The Chain Home radar system
 To
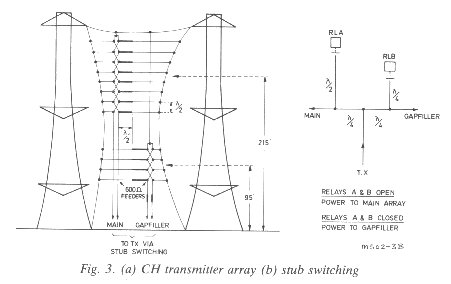
fill the first gap, an auxiliary stack of four similar end-fed dipoles and reflectors
was provided at a mean height of 95 feet producing a main elevation lobe at
about 6o. This auxiliary array, known as the 'Gapfiller', was selected
remotely by the operator, the change over from main array to gapfiller being
made by relay-operated stub switching of the transmission line, figure 3b.
To
fill the first gap, an auxiliary stack of four similar end-fed dipoles and reflectors
was provided at a mean height of 95 feet producing a main elevation lobe at
about 6o. This auxiliary array, known as the 'Gapfiller', was selected
remotely by the operator, the change over from main array to gapfiller being
made by relay-operated stub switching of the transmission line, figure 3b.
Both the eight-stack and the four-stack arrays were slung on the same centre line as a 'curtain' between the cantilevers of two of the four 360 feet steel towers. R.F. power from the transmitter was fed to the curtain by a 600 ohm, open-wire, balanced transmission line and stub matched to the array. The four-stack array was matched to the transmission line by a quarter-wave transformer of suitable impedance slung in the transmission line to the four-stack. As the system was not a true 'floodlight' because of the directional characteristics of the dipole stack and the suppression of the unnecessary back radiation by reflectors, each station was allocated a 'line-of-shoot' (LOS), which determined the alignment of the antenna with respect to the coastline.
THE RECEIVING SYSTEM
The simplified block diagram shown in figure 1 illustrates the operating principles: r.f. pulses 'back scattered' from all aircraft in the 'floodlit' zone are received by a set of crossed horizontal dipoles positioned at an effective height of 215 feet above the ground.
The output of the E-W dipole (Y) is fed to one of the stator coils of the goniometer and that of the N-S (X) dipole to the other. The signals are com-pared by 'swinging the gonio' for a minimum deflection of the 'echo' on the CRT display. A minimum rather than maximum was used as it gave a sharper and more precise indication of azimuth when the signal-to-noise ratio was adequate, the gonio bearing 'rose' being aligned accordingly. For weak signals, of poor signal-to-noise ratio, the gonio was swung for a maximum, and the indicated bearing corrected by 90o.
With this method of direction finding (D/F), an aircraft on a reciprocal bearing would give exactly the same indication on the gonio. This ambiguity was resolved by having remotely switchable reflectors 1/4 wavelength behind the dipoles and noting whether the signal strength increased or decreased when they were switched in. This 'sensing' was done by the operator at the console before passing a plot.
The effective height of the crossed dipole stack was 215 feet which, on a flat site, would give rise to a wide vertical gap in the polar diagram centred at an elevation angle of approximately 5.2o; the radar would, therefore be blind at this elevation. This was overcome by having a second crossed-dipole stack at a mean height of 95 feet with a main elevation lobe of approximately 5.9o which, in conjunction with the transmitter 'gapfilling' lobe, effectively closed the gap, the switching being done remotely by the operator at the console whilst searching for, and tracking, targets.
Heightfinding was achieved by comparing the signal received by the 215 feet dipole stack (angle = 2.6o) with the signal received from the same aircraft by the 95 feet (angle = 5.9o) stack, the ratio of these two signal strengths being related to the angle of elevation of the aircraft, see figures 4 and 5. The ratio of the signal strengths is measured by feeding the signals received by the Y dipoles of the A system at 215 feet to the Y coil of the goniometer and the signals received by the Y dipoles of the B system at 95 feet to the X coil of the goniometer, see figure 4. The goniometer was then 'swung' for a minimum deflection of the echo on the CRT in exactly the same way that the azimuth angle (D/F) was determined in the direction finding mode. The number indicated by the goniometer pointer was then 'inputted' to a simple electro-mechanical computer known as the 'fruit machine' which also accepted the range of the target and performed the simple calculation: height (in feet) = 5280 (R sin angle+ R2/10000). The R2/10000 term corrects for earth curvature, assuming an effective earth's radius equal to four thirds of the true radius.
(This article is taken from "The GEC Journal of Research", Vol. 3 No.2 1985 pages 73-83 and has been reproduced with the kind permission of the Editor. The copyright of the material remains with the owner.)


