
The Chain Home radar system
Many ingenious ideas were tried in an endeavour to generate an r.f. pulse with fast leading and trailing edges and a minimum of c.w. breakthrough during the interpulse period together with very low intrapulse FM. The final solution used a biased-off tetrode coupled as a modified Hartley oscillator tuned to half the station frequency and gated by a fast, positive-going pulse applied simultaneously to both control and screen grids. The gating, or modulating, pulse, was generated by a pair of mercury vapour thyratrons associated with a somewhat complicated timing and trigger circuit.
The pulse oscillator was coupled to a balanced class 'C' frequency doubler-driver stage consisting of a single power tetrode and a 'dummy' valve of equivalent capacity to provide a symmetrical, balanced output.
The output stage consisted of a pair of push-pull, high power tetrodes operating in class 'C' driven by the balanced output from the frequency doubler stage. The final output was fed via Pyrex d.c. blocking capacitors and 600 ohm open wire feeder to the antenna system.
Frequency selection was achieved by remote control of a motorized, multi-pole rotary switch which selected the appropriate pre-set tuned circuits. The tetrodes used a tungsten filament operating at 18V/ 140 A. In its final form, the transmitter worked with around 35 kV on the anodes of the output stage and delivered a peak r.f. pulse power of approx 750 kW.
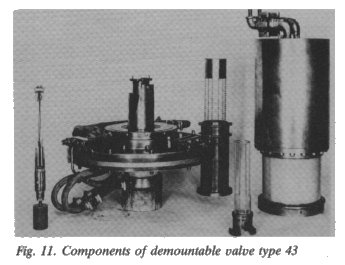
The water-cooled power tetrodes Type 43, figure 11, were of particular interest, being demountable to permit replacement of the filament, control grid and screen grid. A vacuum plant using a two stage oil-diffusion pump backed up by a rotary pump continuously evacuated the system. The state of the vacuum was monitored by Pirani gauges which controlled the operation of the plant and provided the interlock should the gas pressure rise above the permitted safety level.
The tetrodes were cooled by distilled water pumped round a closed circuit heat exchanger, the water being delivered to the tetrode anodes by coiled rubber tubes wound as chokes to prevent r.f. leakage.
When a tetrode was let down to air to replace an electrode, usually the filament, the tube had to be pumped down to a hard vacuum. To reduce the time taken to reach correct operating pressure, the tetrode was 'conditioned' by applying raw a.c. to the electrodes, whilst the anode was held at a steady d.c. potential. This process caused the electrodes to be 'bombarded' and accelerated the emission of occluded gases, which were then drawn off by the vacuum pumps. The conditioning process was carried out with the tetrode in-situ, the additional components and control arrangements being incorporated in the basic transmitter design. The transmitter was triggered by incoming positive pulses derived from the timing circuit in the receiver, which also generated the command signal to reduce the pulse length from 20 us to 6 us.
RECEIVER AND DISPLAY UNIT
The receivers were designed and manufactured by A. C. Cossor Ltd. to a TRE specification. As the war progressed, many modifications, improvements and additions were made to the original design, although the basic principles briefly described here remained virtually unchanged, figure 12. Figure 13 shows a general view of the receiver and display console, while figure 14 shows the team of operators at work.
The incoming co-axial cables from the receiver masts were fed via the 'phasing box' and motorized selector unit previously described, to the goniometer stator coils. In accordance with the original four frequency plan, there were actually four gonios each dedicated and calibrated to a spot frequency and all mechanically linked to a single search knob. A wave-change switch routed the operational goniometer search coil to the input stage of a three-stage r.f. amplifier. To preserve symmetry and hence stability, the r.f. stages were arranged in a push-pull arrangement, with each stage housed in its own screened box. The input stage used a pair of special low noise, 'aligned-grid' pentodes known as EF8s, very advanced valves for that period.
A push-pull mixer using a pair of triode-hexodes with separate triode local oscillator, down-converted the signal to 2 MHz was fed via a buffer and a two stage interference rejection unit (IFRU) to a 5 stage, single-ended i.f. amplifier. A choice of 3 bandwidths: 500 kHz, 200 kHz and 50 kHz was available to the operator selectable by a lever above the display. The matched bandwidth was theoretically 50 kHz, but many operators preferred a wider, non-optimum bandwidth as an aid to pattern recognition and raid strength assessment.
However, in the presence of jamming, the narrow bandwidth was used. After full-wave detection, the video signal was passed via a pair of push-pull deflection amplifiers to the Y plates of the CRT.
An important feature of the design of the r.f., i.f. and video stages was the necessity of restoring full sensitivity, immediately after the incidence of an overloading signal which could 'paralyze' the amplifiers. Care in the choice of decoupling capacitors, impedance of power supplies and time constants in general, was essential.
(This article is taken from "The GEC Journal of Research", Vol. 3 No.2 1985 pages 73-83 and has been reproduced with the kind permission of the Editor. The copyright of the material remains with the owner.)


