Navigational Aids
Gee AMES Type 7000
Range Difference Systems
If two transmitters A and B in Fig. 17.2 send out a train of pulses in synchronsim, but on different radio frequencies, an aircraft, or a ship, situated any-where along the line PQ, which bisects AB at right angles, will receive the pulses from A and B simultaneously.
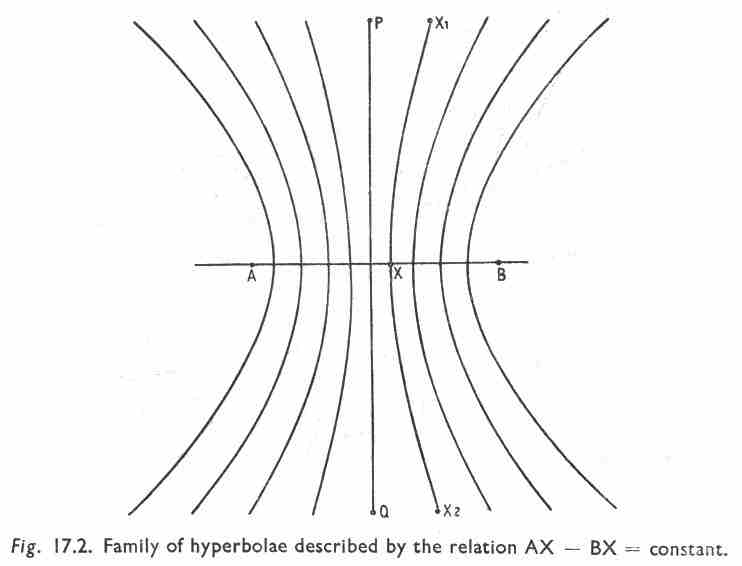
If the receiver is at the point X it is apparent that it will receive the pulses from B slightly before the pulses from A. In fact there will be a whole series of points, along the line X1 X X2 where the pulses from B will be received in advance of those from A by the same amount. In terms of geometry the line X1 X X2 is the locus of all points that satisfy the relation:
AX - BX = constant.
This is one of the ways of defining the curve known as a hyperbola. By assigning a series of values to the constant in the equation a family of hyperbolae is defined. In our case we are going to measure not the differences in the distances AX and BX, but the differences in the times that wireless waves take to travel those distances. We can now describe the hyperbolae by the equation
AX/c - BX/c = 1, 2, 3 etc. microseconds, where c = velocity of wireless waves.
The hyperbolae can be labelled 1, 2, 3 etc., microseconds and thus by measurement of the time interval between the receipt of pulses, and noting whether the A or the B pulse is received first, a navigator could find out on which hyperbola his position lay. To enable a position fix to be obtained a third transmitter is required also transmitting pulses in synchronism with A and B and located in such a position that the two families of hyperbolae intersect. Fig. 17.3 shows a typical arrangement.
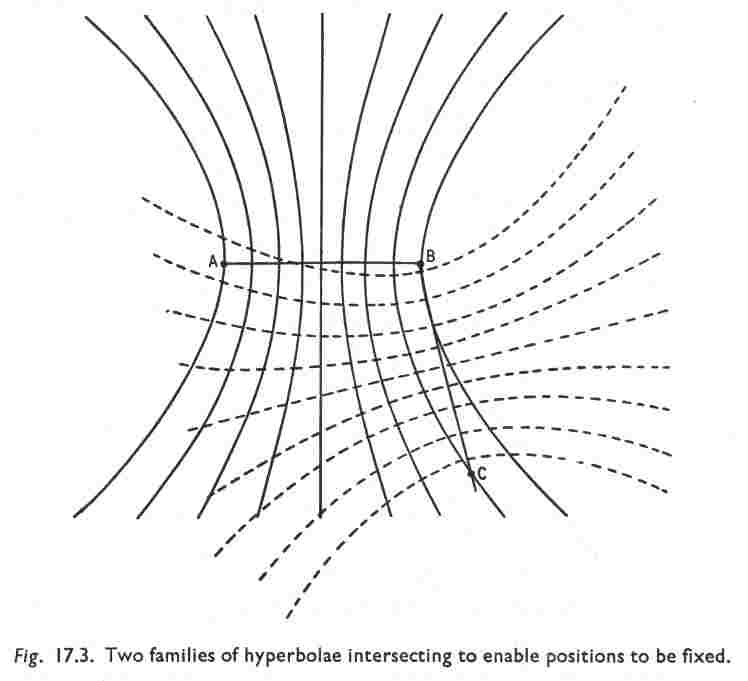
It will be appreciated, from the divergence of the hyperbolae, that the accuracy of fix will be greatest in the vicinity of the base lines and will decrease as the distance from the transmitters increases.
A very great advantage of hyperbolic navigational systems is that they cannot be saturated; there is no limit to the number of navigators who can make simultaneous use of the system.