
Rotor radar system
Radar Type 15 GCI
The following information is reproduced from SD 727, Part 2 , Section 3, Chapter 2: (A.L. 2, Oct 58)
Radars Type 15 Mark 5
Introduction
 9.
Radar Type 15 is a mobile metre-wave searchlight azimuth-search radar used for
control,capable of giving not only plan positions but also approximate heights
of targets. Mk.5 is a re-engineered version of the earlier Type 15, produced
to work with Rotor type equipment in the Vast convoys. It consists of an
aerial system mounted on a cabin containing a radar transmitter and receiver
together with I.F.F. gear, with a prime mover vehicle carrying the pivot mount
of the cabin and the aerial turning gear; the whole being also described as
RVT503 Mk. 1. The displays and control gear are mounted in the mobile operations
room RVT510 and are described in Chap. 4 of this section. The radar will be
fitted with an I.F.F. Mk. 10 installation.
9.
Radar Type 15 is a mobile metre-wave searchlight azimuth-search radar used for
control,capable of giving not only plan positions but also approximate heights
of targets. Mk.5 is a re-engineered version of the earlier Type 15, produced
to work with Rotor type equipment in the Vast convoys. It consists of an
aerial system mounted on a cabin containing a radar transmitter and receiver
together with I.F.F. gear, with a prime mover vehicle carrying the pivot mount
of the cabin and the aerial turning gear; the whole being also described as
RVT503 Mk. 1. The displays and control gear are mounted in the mobile operations
room RVT510 and are described in Chap. 4 of this section. The radar will be
fitted with an I.F.F. Mk. 10 installation.
Leading Particulars
10. The leading particulars of Radar Type 15 Mk. 5 are:-
(a) Radio Frequency. The radar is continuously tunable over the range 190 to 212 Mc/s (l = 1.42 1.58 metres).
(b) Pulse Width and Bandwidth. The transmitted pulses are 3.8 us wide, and the I.F. bandwidth of the receiver is about 1 Mc/s.
(c) P.R.F. The radar can operate at any P.R.F. between 250 and 550 p.p.s. It is normally run at either 250 or 500 p.p.s., as selected from the master P.P.I. console.
(d) Output Power. The peak R.F. output power of the transmitter can be varied between 50 and about 500 KW.
(e) Receiver Noise Factor. The receiver noise factor should not be greater than 8 db.
(f) Polarization. The radar generates horizontally polarized radio waves.
(g) Beamwidth. The beamwidth of both arrays in azimuth is about 15o to half-power points. The vertical radiation patterns are much affected by interference from ground reflections, and are discussed in paras. 16 and 17.
(h) Scanning Rate. The radar can be made to scan in azimuth clockwise or anti-clockwise at any rate between 1/2 r.p.m. and 6 r.p.m. as fixed by the setting of a control on the masterP.P.L. console. Position laying is also possible.
Aerial System and Turning Gear
 11.
The Type 15 aerial system consists of two separate and identical arrays of dipoles,
mounted in the same vertical plane on a framework fixed to the side of
the cabin (see Fig. 3). Each array consists of eight full-wave horizontal dipoles
arranged in two stacks of four, and the centres of the two arrays are five feet
apart; the cabin is mounted on a jacking frame for operational use, and the
mean height of the whole aerial may be varied between about 10 and 12 1/2 feet.
A steel-mesh vertical reflecting screen (26 feet by 11 1/2 feet) is mounted
at a distance 1/8 l behind
the dipoles. The aerial system is designed to work efficiently at any frequency
in the range 190 to 212 Mc/s without adjustment (though its efficiency may fall
off noticeably at the top end of this band), and can be folded for transport.
11.
The Type 15 aerial system consists of two separate and identical arrays of dipoles,
mounted in the same vertical plane on a framework fixed to the side of
the cabin (see Fig. 3). Each array consists of eight full-wave horizontal dipoles
arranged in two stacks of four, and the centres of the two arrays are five feet
apart; the cabin is mounted on a jacking frame for operational use, and the
mean height of the whole aerial may be varied between about 10 and 12 1/2 feet.
A steel-mesh vertical reflecting screen (26 feet by 11 1/2 feet) is mounted
at a distance 1/8 l behind
the dipoles. The aerial system is designed to work efficiently at any frequency
in the range 190 to 212 Mc/s without adjustment (though its efficiency may fall
off noticeably at the top end of this band), and can be folded for transport.
12. The dipoles are energized through twin-feeder lines, which are so designed that all the elements of each array are fed in phase with one another. The two arrays are connected to the transmitter through an aerial change over switch that makes it possible to energize them in the following three ways, by remote selection from the master Console 61:-
(a) Both arrays, in phase (switch position PHASE).
(b)
Both arrays, in antiphase (switch position ANTIPHASE).
(c) Top array
only (switch position TOP).
The use of these facilities is explained in para. 17. The arrays are connected to the receiver through two T.R. switch units, one for each array, and a diode switch unit that enables signals to betaken from each in turn, during alternate pulse repetition periods, for comparison in height-finding (see para. 16); or signals may be taken from the whole aerial and the bottom array in turn (phase check). The switching of this unit depends on a square wave supplied from the operations vehicle (from the same multivibrator unit that triggers the Type 15 transmitter), and is selected at the master Console 61 by the height switch. It is possible (in the height-switch position NORMAL) to stop the diode-switching and receive each pulse from the whole aerial.
13. The cabin rotates as a whole on a pivot mount whose base is secured to the mounting frame on the vehicle chassis. All connexions from the cabin to outside are made through slip-rings, which are on top of the pivot mount inside the cabin. The cabin turning gear has the following three principal modes of operation:-
(a) Continuous rotation at any rate between 1/2 r.p.m. and 6 r.p.m., clockwise or counter-clockwise.
(b) Position control, aligned on any bearing decided by the operator.
(c) Continuous rotation in synchronism with another radar, either on the same bearing as this radar at all instants or back to back", i.e. on the reciprocal bearing.
To provide these facilities the aerial turning motor (a 5 h.p. D.C. motor acting through a 250: 1 reduction gear) is driven by a variable D.C. output from a special type of D.C. generator called an amplidyne; the output of the amplidyne is varied by varying its field currents, which are supplied from a servo-amplifier located and controlled in the operations vehicle, and thus the amplidyne serves essentially as a current amplifier to provide locally the large current needed to drive the turning motor. For continuous rotation the amplidyne is made to give a constant output:while for position control the aerial position is monitored by a selsyn driven by the turning motor (see Sect. 2, Chap. 4, para. 19 of this part), and if the angular position of this selsyn does not coincide with that of a selsyn controlled by the operator then a signal is passed to the amplidyne to drive the motor, acting as a servo system, until the two selsyn positions are the same, i.e. until the aerial is pointing where it is meant to point.
It is also possible to synchronize the continuous rotation of up to four radars with this turning gear (which is also used on Type 14). For this purpose one of the radars is chosen as master and operates on normal speed control; the others, called slaves,are on a form of position control with their servo-control selsyns connected to the selsyn of the master, so that they are locked to it in angular position. On each radar the turning motor also drives a repeat-back selsyn that transmits information on the aerial position back to the operations vehicle.
Transmitter and Receiver
14. The Type 15 transmitter is normally triggered by pulses from a master multivibrator unit in the I.G. rack of the operations vehicle (see Chap. 4, para. 6 of this section), at any required P.R.F. between 250 and 500 p.p.s.; but it can also be triggered from a 250 c/s or 500 c/s A.C. with variable phasing (when the height-finding facility is not wanted), or can free-run at 250 or 500 p.p.s. The radar modulator develops 4 us pulses at the working P.R.F., of amplitude variable between 6 and 11 1/2 KV from a control unit in the transmitter cabinet. These pulses are applied to the R.F. oscillator, which consists of two air-cooled triode valves with resonant (Lecher) lines, tunable over the range 180 to 220 Mc/s. The output, R.F. pulses of peak power depending on the amplitude of the modulating pulses, is taken by a twin feeder to the aerial changeover switch on the cabin roof. The transmitter incorporates a monitor from which the performance of the radar can be checked.
15. The receiver is isolated from the transmitter by two T.R. switch units, one for each array, employing spark gaps. Received signals are first amplified by a low-noise R.F. amplifier and then mixed with the output of a conventional local oscillator to give signals at the standard 45 Mc/s I.F.: the I.F. signals are then given about 60 db more amplification before being passed to the operations vehicle. The transmitter and local oscillator are so stable that A.F.C. is not applied.
|
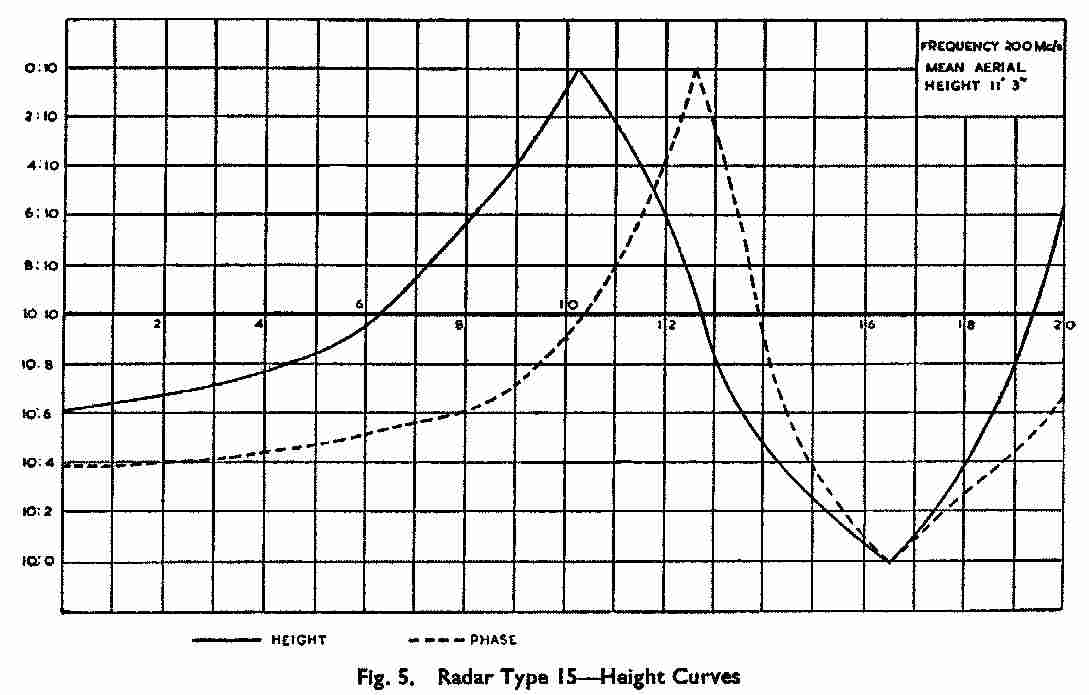
Height Finding 16. Signal comparison (see Sect. 2, Chap. 4,paras. 34 to 38 of this part) is used for height-finding with Type 15, the responses from two arrays being compared visually on a split A-scope display (Console 61: see Chap. 4 of this section). The normal comparison is between top and bottom arrays, whose theoretical vertical radiation patterns are shown in Fig. 4 for a mean aerial height of 11 feet 3 inches and a frequency of 200 Mc/s; the ratio of amplitudes is estimated by the operator, quoting the larger as 10, and its variation with target elevation angle is shown for that instance in Fig. 5 (full line). This comparison is subject to ambiguity, which can be resolved by the phase check of comparing the bottom array against the whole aerial (Fig. 5, broken line). Below about 5o and also in the neighbourhood of 16o, the accuracy of height estimation is poor. Since the comparison method is based on the sequential switching of received signals, it is unaffected by the transmitting radiation pattern, i.e. whether the arrays are fed in phase or antiphase. In practice, the information from a suitable version of Fig. 5, checked if possible by calibration, is presented on a height chart such as Fig. 6; on this chart the operator can, by the use of a straight-edge through the origin, quickly correlate signal amplitude ratio with range to obtain the rough height of the target. Each chart can be valid only for one mean aerial height and one radio frequency. |
|
|
|

Continued on next page....
The information above is reproduced from SD 727, Part 2 , Section 3, Chapter 2: (A.L. 2, Oct 58)


